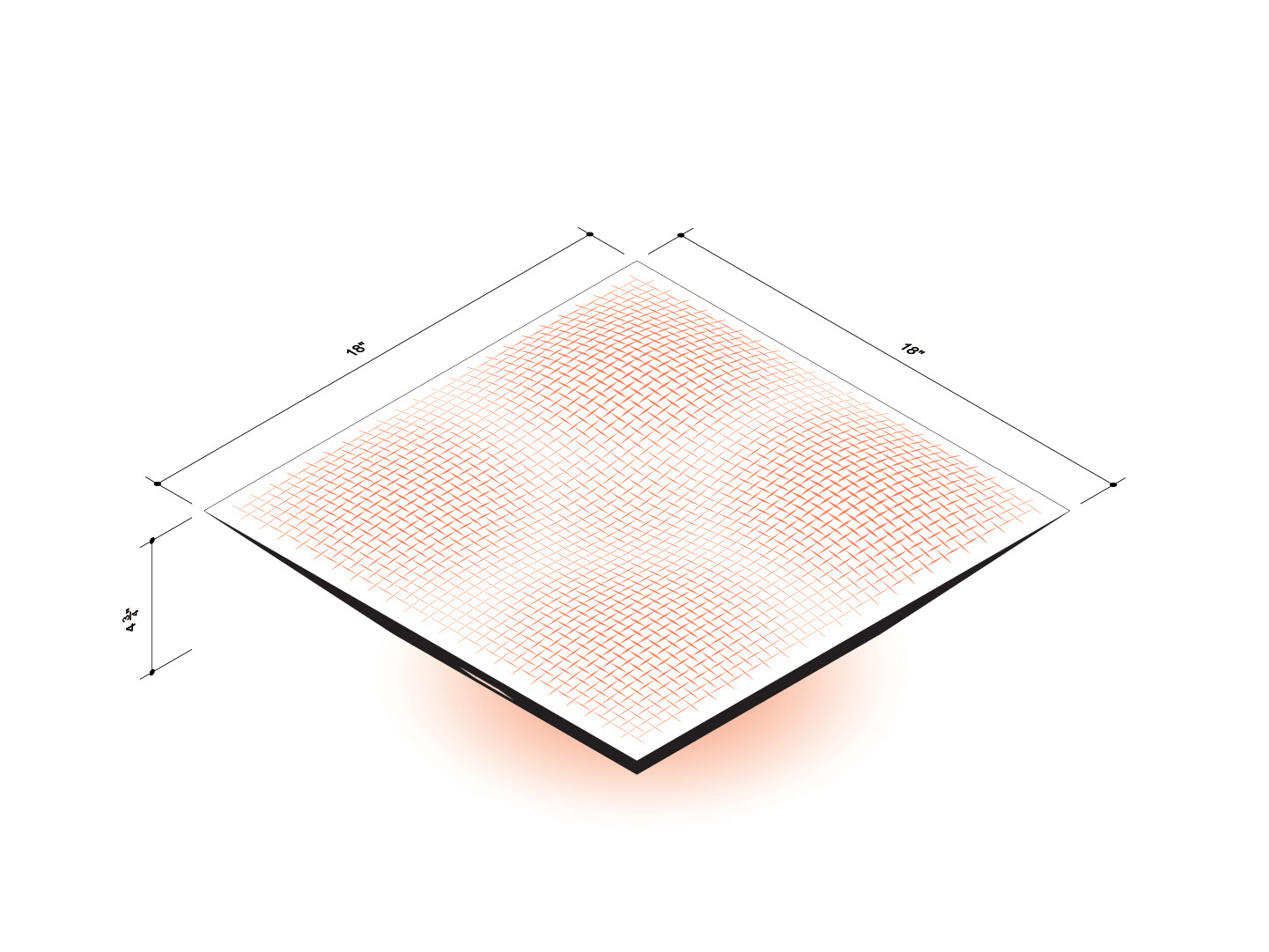
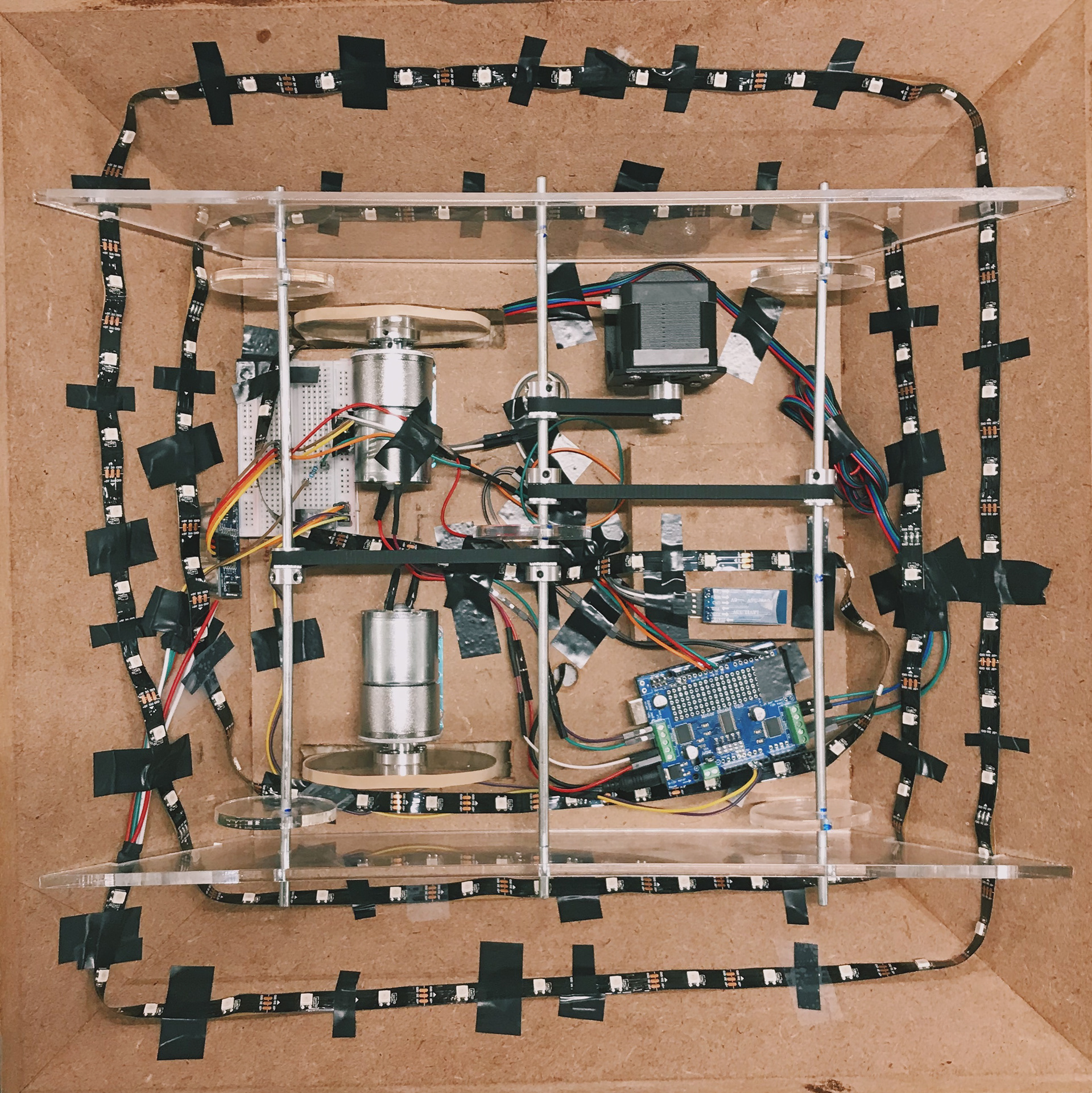
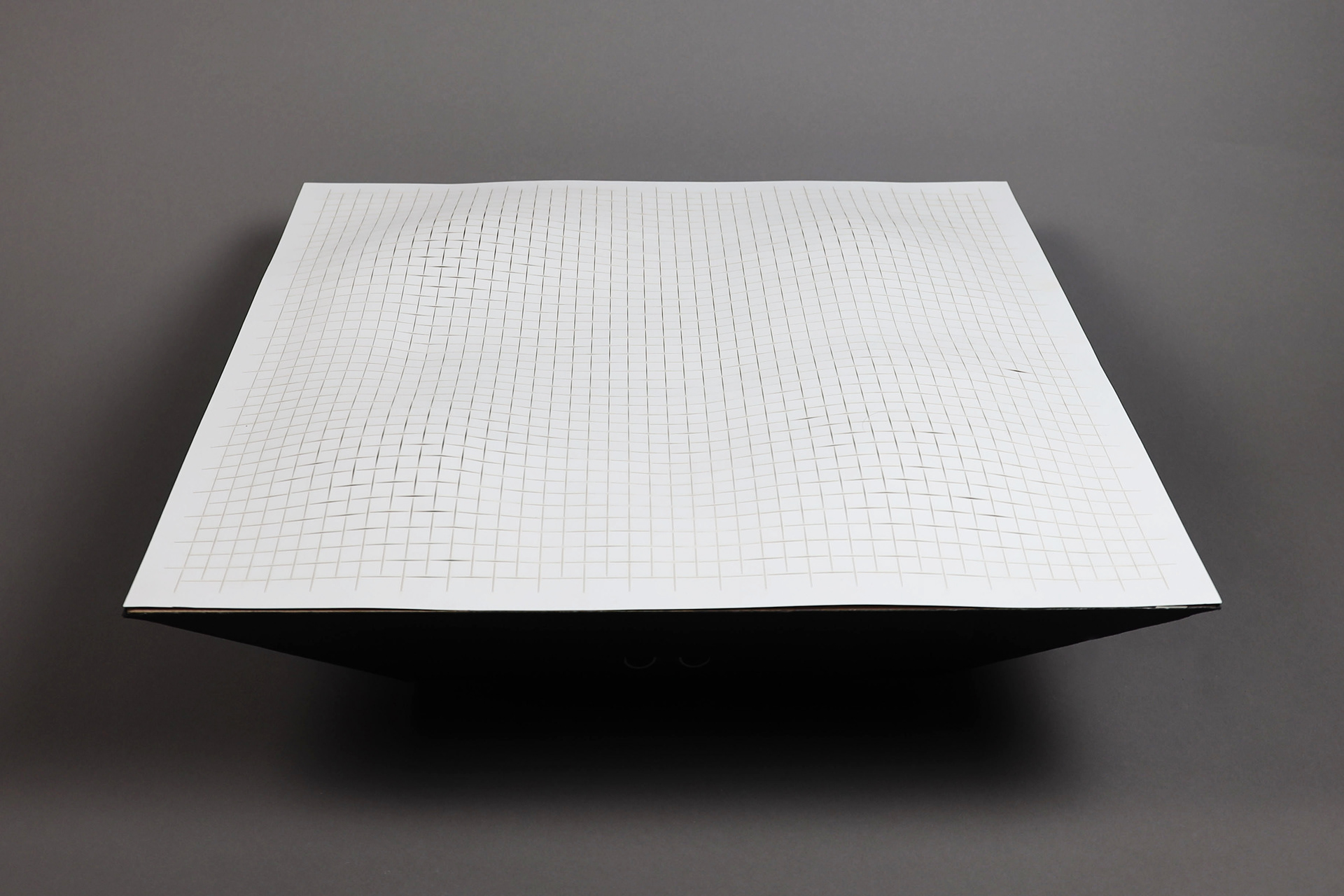
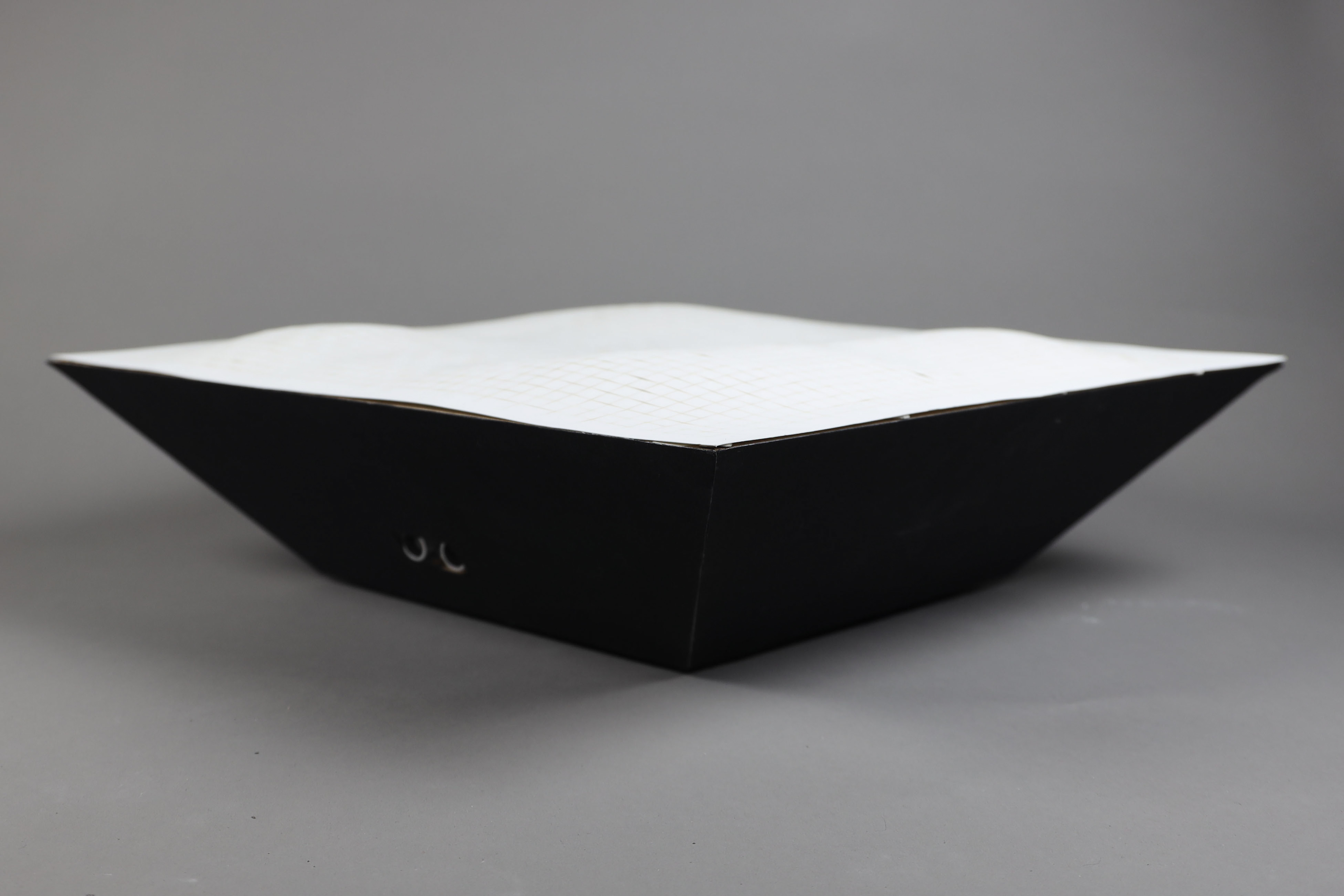
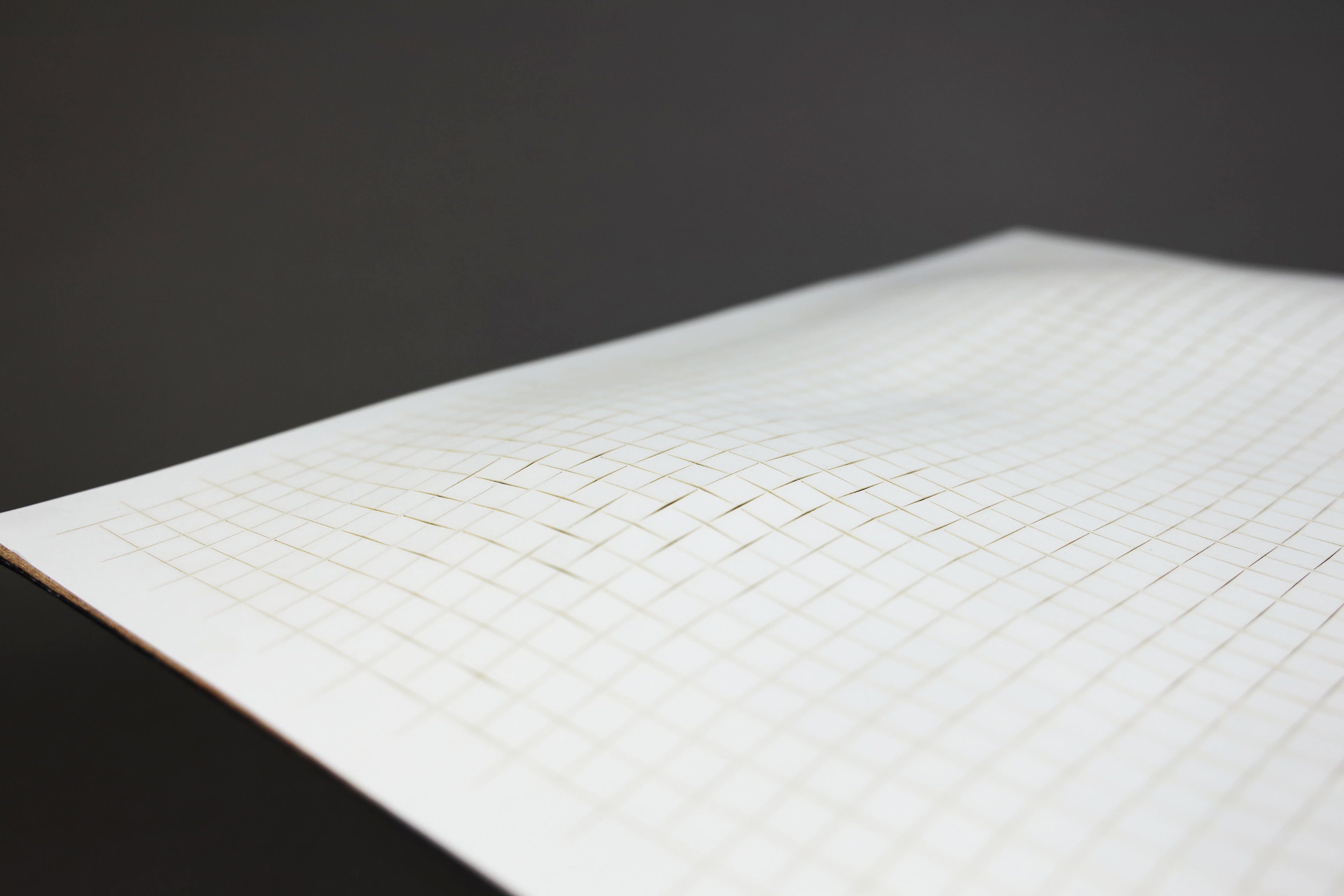
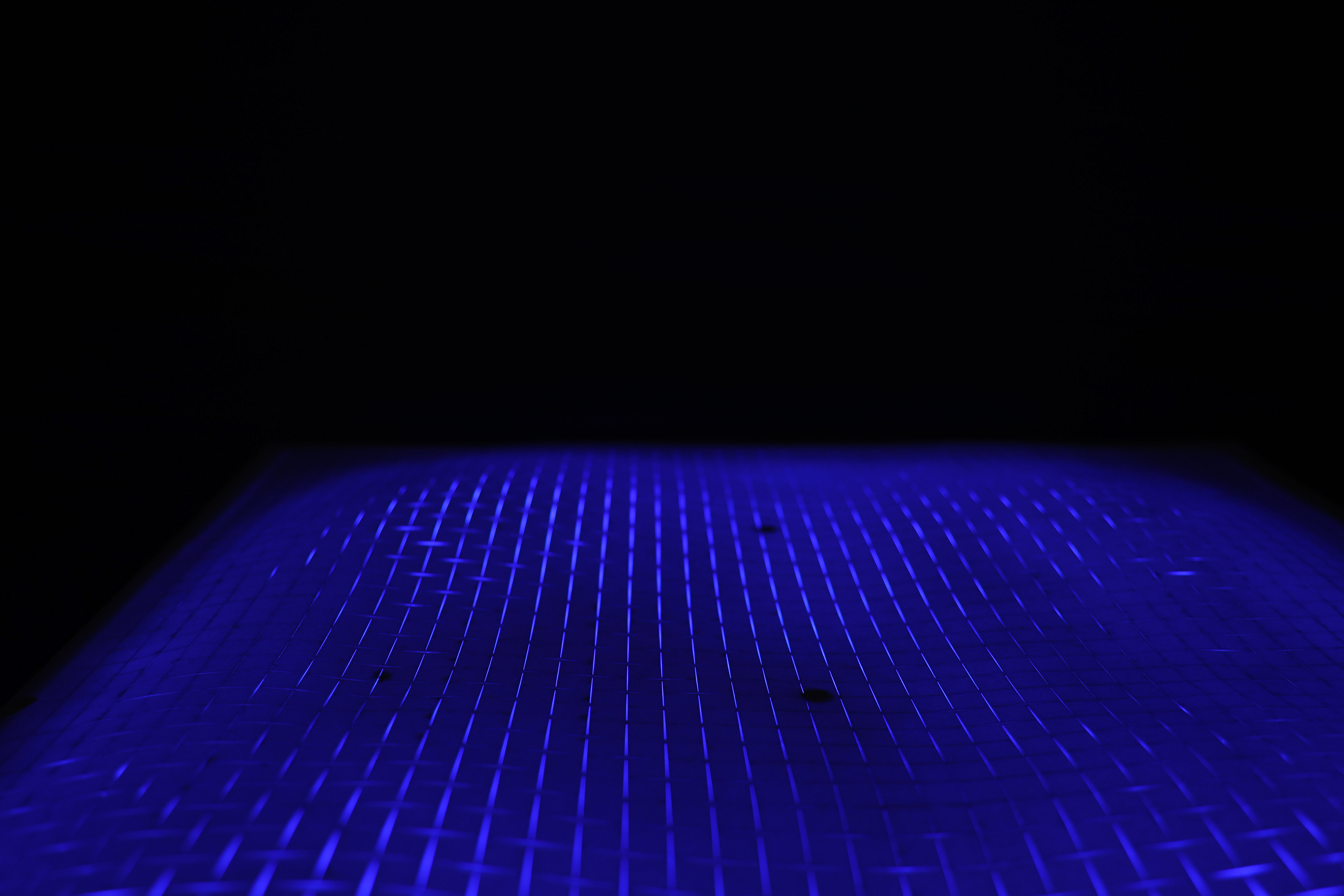
PartyBot addresses how technology can automize and solidify social conventions of gathering through reflection and activation. PartyBot reflects social scenarios through rhythmic pulsing derived from proximities in gathering. The frequency in its breathing and oscillation between warm and cool hues are direct correlations to the level of excitement within social moments, and in turn activate their development as well. In a vacant space, the robot’s auxetic surface is blue and pulses slowly. As occupation and energy in a space increases, the robot shows excitement, pulsing more quickly and changing to a red tone. This looped feedback between human and technology create an extension of the social body that primes the space for its users. The robot was coded using Arduino, controlled using a phone bluetooth connection, and responded to its environment using light and proximity sensors.